
Hallihallo im März kurz vor der Saison 2016,
heute ein kleiner Ausflug in hybride Systeme, mit denen ich mich gerade beschäftige.
Zitat einer Dipl.-Ingenieurin, die ihre Doktorarbeit über Hybridsysteme schreibt:
„Mit hybriden Systemen bzw. hybriden Modellen ist die Kombination zwischen der kontinuierlichen und der diskreten Dynamik eines Systems gemeint.
Die kontinuierliche Dynamik ergibt sich durch die Änderung kontinuierlicher Größen über die Zeit (z. B. Geschwindigkeit, Temperatur, Wasserfüllstand) und die diskrete Dynamik beschreibt diskrete Zustände eines Systems, die beim Auslösen eines Ereignisses auftreten (z. B. Ventil_offen; Ventil_zu; Motor_an, Motor_aus).
Heutzutage zeigen fast alle Systeme ein hybrides Verhalten.
Viele Grüße, Leila“
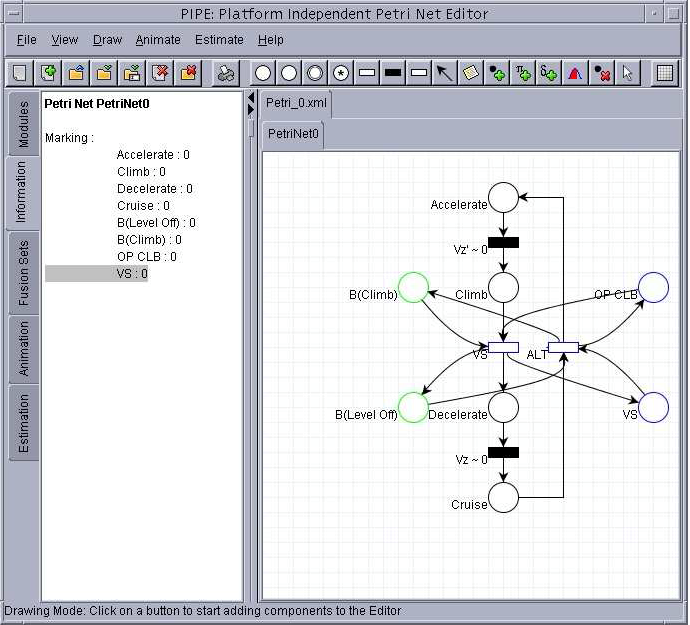
 Modell-Berechnung von Hybrid-Systemen
Modell-Berechnung von Hybrid-Systemen
Meine Frage hierzu:
Wird bei deinen Analysen auch der Faktor Mensch mit berechnet? Denn der ist ja unberechenbar. 😉
Die Antwort:
„Sowohl der Mensch als auch das technische System werden als dynamische Systeme mit unterschiedlichen Reaktionszeiten modelliert. Je nach Fahrsituation kann der ein oder das andere eingreifen. Solange der Mensch in der Lage ist, z. B. das Auto zu fahren, wird diese Aufgabe ihm überlassen. In dem Moment, wo seine Reaktionszeit größer wird, d. h. er ist langsamer geworden (z. B. wegen Müdigkeit) übernimmt das Assistenzsystem die Steuerung.
Das Rollstuhl Experiment sieht so aus: Man definiert eine Strecke mit Kurven und geradeaus Teilstrecken. Der Nutzer soll den Rollstuhl steuern. Die Geschwindigkeit und Positionsänderung sind in dem Fall kontinuierliche Größen.
Die Aktionen vom Menschen sind diskrete Zustände, z. B. (Joystick_vorne, Joystick_links, Joystick_rechts, …). Mit den verschiedenen Auslenkungen des Joysticks ergeben sich bestimmte diskrete Zustände. Ein Fehler im Nutzerverhalten wird erkannt, wenn es sich z. B. um eine Kurve nach links handelt, und es wird geschätzt, dass der Nutzer im nächsten Zeitpunkt den Joystick nach links auslenken soll, dies wird aber nicht gemacht. Hier wird ein Fehlverhalten detektiert, und der Rollstuhl übernimmt die Steuerung und wechselt vom Betriebsmodus „Manuelle Fahrt“ auf „Autonome Fahrt“.
Zur Implementierung: Die Schätzung könnte anhand von Partikelfiltern oder Kalman-Filtern gemacht werden. Die diskreten Zustände können mittels Petri-Netzen oder Automaten modelliert werden.
Wenn dich die psychologische Betrachtung des Fahrers interessiert dann handelt es sich hier um das Thema „kognitives Verhalten“ vom Fahrer bzw. kognitive Modelle.
LG, Leila“
Ihr seht also, es ist alles berechenbar. Die kognitiven Modelle schauen wir uns in einem späteren Bericht noch an – soweit bin ich noch nicht. 😉
Schöne Grüße – und gleich noch was praktisch Nachvollziehbares und Effektives –
Chrissi